 5/15(金)に行なわれましたB4の導入実験報告会について、B4の肥後と森が報告いたします。
5/15(金)に行なわれましたB4の導入実験報告会について、B4の肥後と森が報告いたします。
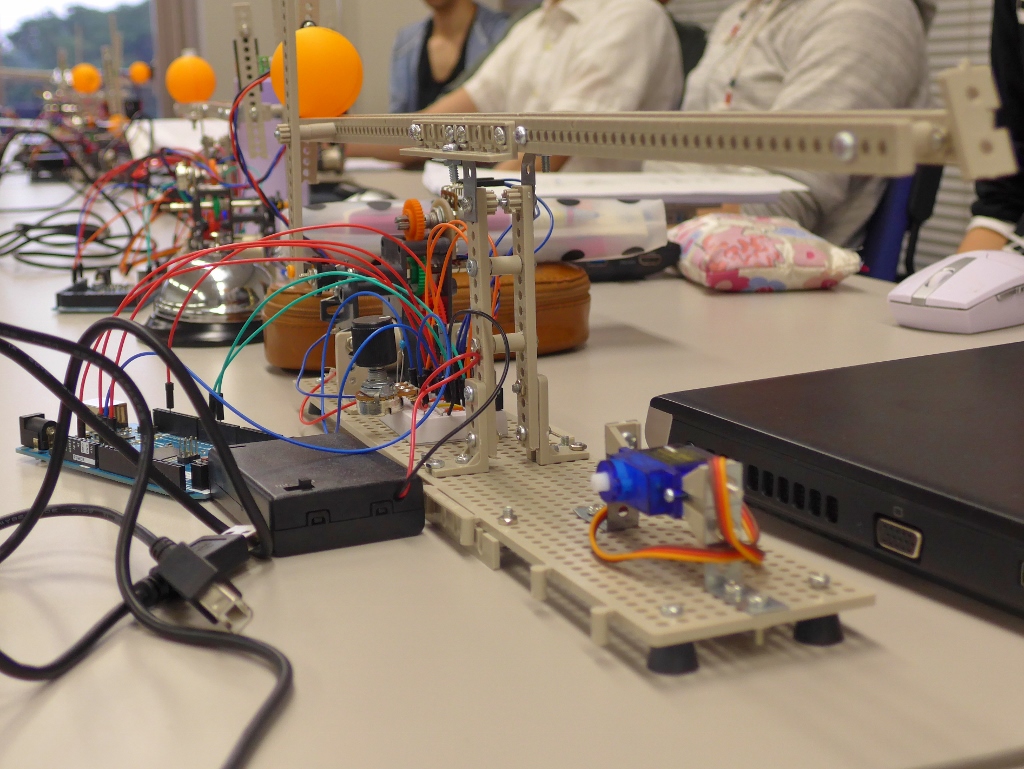
4月に研究室に配属されてからの1ヶ月半の間、『ArduinoとMATLABで制御系設計をはじめよう!』という参考書をもとに、自分たちで作製した実機を用いて、制御理論を学びました。導入実験では、MATLABやSimulink、TeXなどのソフトウェアの使い方に慣れることが目標でした。参考書の内容に沿って進めていく共通課題と、それぞれが自由に課題を設定する自由課題に取り組みました。
共通課題は、モータの角速度制御や角度制御から始め、最終的にはシーソーにつながれたアームによって、シーソーに乗せたボールの位置追従制御を行ないました。
自由課題については、発表順にそれぞれ簡単に紹介します。
●松井健:位相進み遅れ補償による応答特性の改善
位相進み補償で過渡特性を改善してボールがより速い応答をするように、位相遅れ補償で定常特性を改善してより安定性のある動きをするように設計した。
●田巻櫻子:サーボモータのARXモデルを用いたシステム同定
シーソーの角度制御に使ったサーボモータの特性をARXモデルという数理モデルを用いてモデリングした。また、得られたモデルと物理モデルをボード線図により比較することで、モデルの整合性を調べた。
●森翔平:オブザーバによる状態推定 (井上正樹賞(PID職人)!)
オブザーバ(状態観測器)を設計して、用いたセンサでは測定できないボールの速度やアームの角速度を推定した。推定した状態変数を用いた状態フィードバック制御を行なった。
●清岡研治:カルマンフィルタによる状態推定
GPS測位や天気予報など幅広く利用されているカルマンフィルタを設計した。カルマンフィルタを用いて、位置や角度の状態推定をすることができた。
●肥後利晃:サーボモータの閉ループシステム同定 (最優秀賞!)
シーソーの角度制御に使ったサーボモータの特性を、ARXモデルという数理モデルを用いて閉ループシステムでモデリングした。そして、むだ時間を考慮した上で、Fit率の値からモデルの妥当性を検証した。
●中川智美:不確かさに対するフィードバック制御の有用性
シーソーの角度とボールの加速度の関係を表わすパラメータの推定を行なった。また、そのパラメータに不確かさがあるときに、フィードバック制御を行なうと不確かさの幅を抑えられることが確認できた。
実機を用いて実際に制御系を設計、実装することで、今まで座学の世界だった制御工学の内容を、体感しながら学ぶことができてとてもためになりました。また、B4には1人ずつM1のメンターが付いて、アドバイスや資料の添削をしていただきました。改めて研究室の環境の素晴らしさを実感できました。導入実験が終わり、これからはそれぞれが自分の研究テーマに沿って研究を進めていくことになります。導入実験で得られた知識や経験を基盤として、足立先生、井上先生のご指導をもとに、優秀な先輩方に追いつけるように積極的に研究を進めていきたいと思います。

